

🦸🏻♂️ About Me
I am a fifth-year Computer Science Ph.D. candidate at Shanghai Jiao Tong University and a member of Machine Intelligence and Vision Group (MVIG) under the supervision of Prof. Cewu Lu (卢策吾). I am also a member of Wu Wen Jun Honorary Doctoral Program (吴文俊荣誉博士班).
I receive my bachelor degree from Shanghai Jiao Tong Universiy in 2021. My research interests lie in Robotics and Computer Vision. Previously, I have been working on deformable object perception and manipulation. Now I am particularly interested in imitation learning with tactile/force sensing and low-cost data collection system.
In the past, I have interned at Microsoft Research Asia under the supervsion of Han Hu, Yue Cao and Jifeng Dai. I also spent time with Prof. Huazhe Xu at Tsinghua University on my projects. In my spare time, I enjoy watching movies and playing with robots🤖.
📰 News
News
📢 Latest: One paper (DeformPAM) is accepted by ICRA 2025!
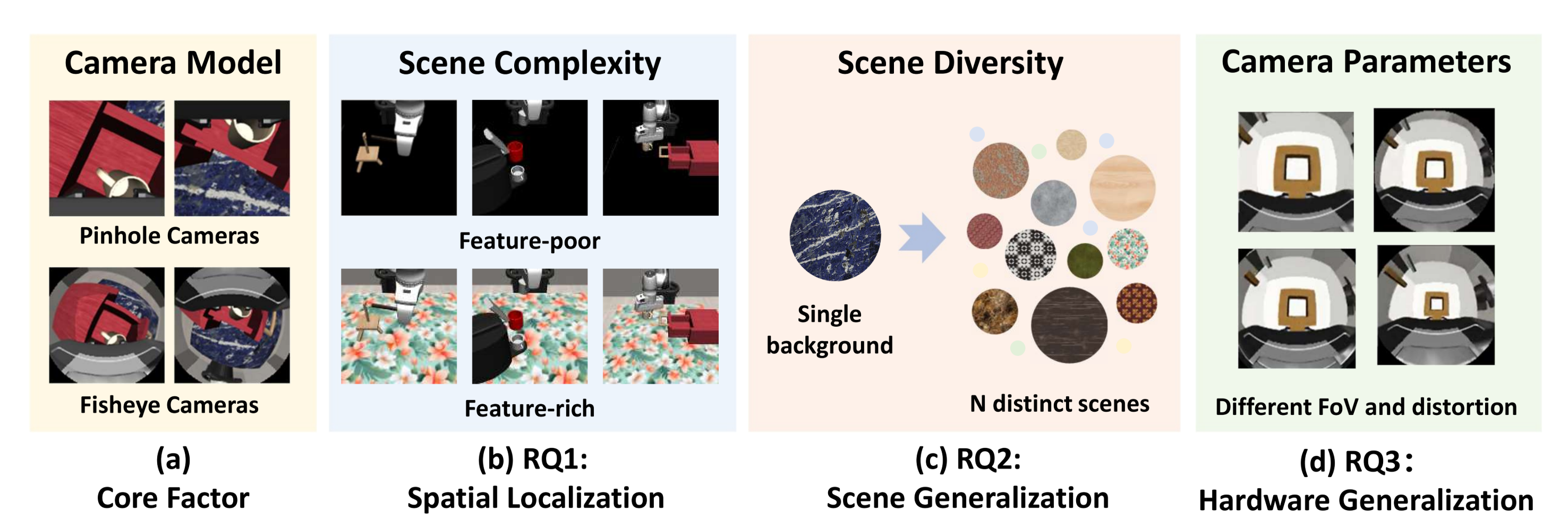
- 03/03/2026 🎉 One paper (Robo-fisheye) is accepted by CVPR 2026!
- 02/06/2026 🎉 Two Papers (SOE and Right-Side-Out) are accepted by ICRA 2026!
- 06/18/2025 🔥 RDP is selected as the Best Student Paper Award Finalist @ RSS 2025!
- 05/23/2025 🔥 RDP is selected as the Best Paper in Beyond Pick and Place workshop @ ICRA 2025!
- 04/11/2025 🎉 One paper (Reactive Diffusion Policy) is accepted by RSS 2025!
- 01/29/2025 🎉 One paper (DeformPAM) is accepted by ICRA 2025!
- 08/31/2023 🎉 One paper (UniFolding) is accepted by CoRL 2023!
- 07/14/2023 🔥 One paper (ClothPose) is accepted by ICCV 2023 as an oral presentation!
🏫 Experiences

Shanghai Jiao Tong University
Ph.D. Student
Research assistant in Machine Intelligence and Vision Group (MVIG), advised by Prof. Cewu Lu
Sep. 2021 - Present

Noematrix
Research Intern
Jun. 2025 - Present

Microsoft Research Asia
Research Intern, advised by Han Hu, Yue Cao and Jifeng Dai.
Jul. 2019 - Mar. 2020
Shanghai Jiao Tong University
Bachelor of Engineering in Computer Science.
GPA 4.04/4.3, Rank 3/150 (Top 2%)
Sep 2016 - Jun. 2021
📄 Selected Publications








✨ Talks
- [Jun. 2025] Invited talk @ Microsoft Research Aisa.
- [May. 2025] Invited talk @ 具身智能之心 on "Robotic Imitation Learning with Vision-Tactile/Force Sensing".
- [Apr. 2025] Invited talk @ TechBeat (将门创投) on "Robotic Imitation Learning with Vision-Tactile/Force Sensing". The link of the recorded video is here.
- [Dec. 2024] Invited talk @ ROSCon China 2024 workshop on "Development Trends and Challenges in Embodied AI". The link of the recorded video is here.
- [Oct. 2024] Invited talk @ TEA lab in Tsinghua University, IIIS on "Efficient Learning for Long-horizon Deformable Object Manipulation"
🏆 Awards
- Best Student Paper Award Finalist [最佳学生论文奖提名] in RSS 2025.
- Wu Wen Jun Scholarship [吴文俊奖学金] in 2024 and 2025.
- Outstanding Graduates in Shanghai (Top 3%) [上海市优秀毕业生] in 2021.
- Rongchang Technology Innovation Scholarship (Top 10 students in SJTU) [荣昶科技创新奖学金] in 2020.
- SenseTime Scholarship (Top 21 undergraduates in China) [商汤奖学金] in 2020.
- National Scholarship (Top 3 students in CS Department) in 2017, 2018 and 2019 (three consecutive years) [国家奖学金(连续三年)].
- Academic Excellence Scholarship (Class A) of SJTU (Top 1% in SJTU) in 2018.
- Meritorious Winner Prize of Mathematical Contest in Modeling in 2018.
- 1st Prize in China Undergraduate Mathematical Contest in Modeling (Shanghai Division) in 2017.